Consecutive-type Reliability Structures Under Warm Standby Redundancy: Some Advances
Ioannis S. Triantafyllou
Department of Statistics and Insurance Science, University of Piraeus, Greece
E-mail: itriantafyllou@unipi.gr
Received 14 September 2024; Accepted 04 October 2024
Abstract
In the present article, we investigate two different reliability structures, which belong to the class of consecutive-type systems under redundancy policy. The resulting structures consist of independent components, but they also dispose warm standby ones. The distribution of the number of working warm components at the time of system’s failure is studied in some detail. Among others, explicit expressions for determining the corresponding probability mass function are established. A short discussion for future work is also developed.
Keywords: 2-within-consecutive--out-of- structures, () systems, warm standby redundancy, Samaniego’s signature.
1 Introduction
In the last four decades, the class of consecutive-type systems has been enormously developed. The fundamental member of this family is the so-called consecutive--out-of-: system , which consists of components and fails if and only if at least consecutive ones fail (see, e.g. [1–4]). It is evident that several extensions of the aforementioned structure have been introduced and studied in the literature. For instance, the -within-consecutive--out-of- system is a natural generalization of the consecutive--out-of-: model and fails if and only if at least out of consecutive components fail . It is straightforward that for , the -within-consecutive--out-of- system reduces to a consecutive--out-of- system (see, e.g. [5, 6]).
In addition, several reliability structures having two common failure criteria appear in the literature. Some of them include a consecutive-type failure criterion. For example, one may consider the well-known structure, which consists of components and fails if and only if at least components or consecutive components fail . It goes without saying that if , the system coincides to the traditional -out-of-: model (see, e.g. [7–9]). Moreover, additional reliability systems with two (or more) failure criteria can be found in [10], wherein the so-called model is introduced. The particular structure contains components and fails if, and only if, there exist at least failed components and at least consecutive failed ones (see, also [11]). Among others, an alternative reliability model, whom operation is related to two different conditions, has been established in [12] and it combines a -consecutive -out-of-: and a consecutive -out-of-: system.
Throughout the lines of the present work, we apply the well-known warm standby redundancy to two specific members of the class of consecutive-type systems. More precisely, we carry out a signature-based investigation for the 2-within-consecutive--out-of- and the system under the aforementioned redundancy policy. In Section 2, we present the definitions of key concepts that will be used later, the reliability models that will be explored, while the necessary terminology is also provided. Section 3 displays the main results of the paper, wherein closed formulae for the probability mass function of the number of working warm components at the time of system’s failure are proved. Finally, Section 5 highlights the contribution of the present manuscript, while some thoughts for its extensions and/or generalizations are also provided.
2 The General Framework and Some Basic Concepts
Let us consider a reliability structure consisting of active components. We next denote by the lifetimes of these components, while corresponds to the system’s lifetime. If we assume that are independent and identically distributed (i.i.d., hereafter), the signature of the system is defined as the probability vector with
| (1) |
where denote the respective order statistics of the random sample (see, e.g. [13]). It is also known that the reliability function of any coherent system consisting of i.i.d. components can be determined by the aid of its signature as given below
| (2) |
Based on (2), one may readily conclude that the system’s reliability function is a mixture of the reliability functions of the corresponding order statistics, with the mixture coefficients being the coefficients in the signature vector. In addition, it is quite interesting that this representation has been extended to the case of coherent systems with possibly dependent component lifetimes (see, e.g. [14]).
On the other hand, the enhancement of the performance of the underlying reliability structures can be gained by applying a standby redundancy therein. Among other types, we next consider the so-called warm standby redundancy (see, e.g. [15]). That practically means that we assume that inactive (warm) components are available for the system, and they can be used whenever it is needed. It is evident that reliability structures under warm redundancy fit well to several real-life applications. For instance, one may consider the so-called cloud computing, wherein load balancers are used to distribute incoming traffic across multiple servers. A warm redundancy policy can be applied to backup load balancers, where a secondary load balancer remains in a standby mode. Another real-life example refers to air traffic control systems, which should maintain high availability for flight safety. Warm redundancy can be used for radar or communication systems where a backup system stays partially active, constantly receiving updates from the active system. For instance, an optimization approach for warm standby series-parallel systems is provided by [16]. Moreover, the reliability of multi-state systems that incorporate warm standby components is investigated by [17]. For a detailed study on the warm redundancy policy, the interested reader is referred to [18].
Under such a scenario, the failure rate of the warm components is assumed to be smaller than the corresponding rate of the active components of the underlying structure. Therefore, some warm components are expected to have failed at the time of system’s failure. However, some of them are supposed to work at the same time. If we denote by the random lifetimes of the inactive warm components of the coherent system, we expect that some of these random variables shall take on larger values with larger probability than the corresponding lifetimes of the active components.
Throughout the lines of the present manuscript, we investigate two different members of the class of consecutive-type systems under warm redundancy policy. The first one is known as -within-consecutive--out-of- systems and fails if and only if at least out of consecutive components fail . For instance, if we consider the special case , , the resulting structure of order 6 fails if and only if there exist at least 2 failed components among 3 consecutive ones. For the particular structure, all failure scenarios having a total number of 3 failed components are presented at Figure 1, where corresponds to a failed (working) component.
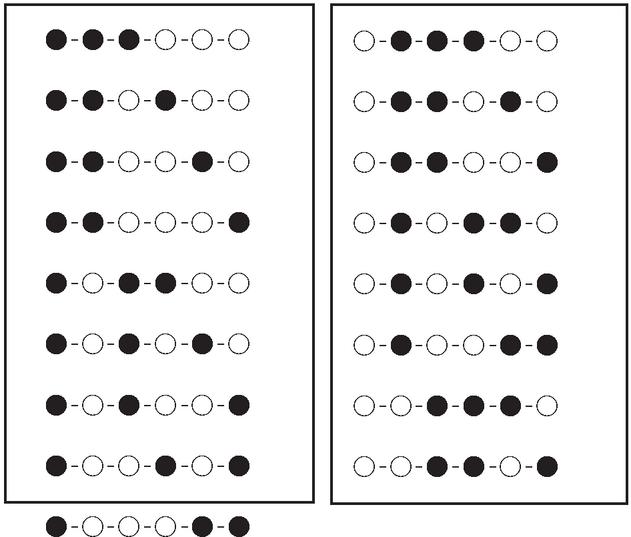
Figure 1 Failure scenarios for the 2-within-consecutive-3-out-of-6 system.
Based on the first two scenarios appeared in Figure 1, we readily observe that the underlying reliability structure fails if components lying at the first three consecutive positions fail or the first two components and the forth component stop their operation.
In the sequel, we shall also consider the so-called structure, which is a reliability model with two common failure criteria. More precisely, the particular system consists of components and fails if and only at least components or at least consecutive components fail . Figure 2 illustrates all combinations of working and failed components, which lead to the failure of a system.
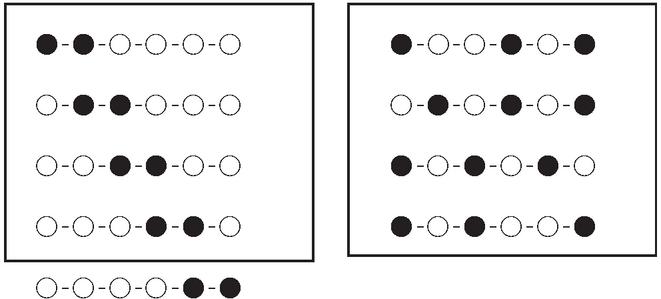
Figure 2 Failure scenarios for the system.
Based on the first two scenarios appeared in Figure 2, we readily observe that the underlying reliability structure fails if components lying at the first two consecutive positions fail or the second and the third component stop their operation.
3 Main Results
In the present section, we establish the main results of the article referring to structures under redundancy. We next consider a coherent system consisting of components and warm (inactive) ones. Our target is to investigate the number of warm components, which are still working at the time of system’s breakdown.
Let us first denote by the lifetimes of the active components of the structure, while correspond to the random lifetimes of the available warm (inactive) components. If represents the lifetime of the system, we next define the random variable such as
| (3) |
which corresponds to the number of surviving warm components at the time point of system’s failure. Kindly note that the random variable , which appears in (3), provides the information whether the th warm component is still working ( or not ().
The following proposition offers explicit expressions for determining the probability mass function of the variable defined earlier, within a 2-within-consecutive--out-of- system consisting of i.i.d. components.
Proposition 1. Let us consider a 2-within-consecutive--out-of- system under warm standby redundancy. If we denote by the number of its warm components and by the number of surviving warm components at the time point of system’s failure (), then if the lifetimes of both active and warm components are i.i.d. and exponentially distributed with parameters and respectively, the probability mass function of random variable can be determined as
| (4) |
Proof. The lifetimes of the active components of the underlying 2-within-consecutive--out-of- system is assumed to follow Exponential distribution with parameter . Therefore, we may express their common survival function as
| (5) |
In a similar manner, one may easily conclude that, since the warm components are assumed to follow an Exponential distribution with parameter , their common survival function is determined as
| (6) |
By definition, the variable takes on value , if exactly warm components out of the available ones have survived till the overall failure of the underlying structure . In simpler words, the event coincides to the event . Since the components are assumed to be independent and identically distributed, we readily observe that
| (7) |
where
| (8) |
corresponds to the number of ways to pick objects out of ones. We next condition the above expression on and by recalling the independence between the warm components the following result is straightforward
| (9) |
Substituting (6) in (9), we obtain that
or equivalently
| (10) |
By the aid of (2), the latter expression takes on the following form
where denotes the coordinate of the signature vector of the 2-within-consecutive--out-of- system, while corresponds to the probability density function of the order statistic . Recalling the well-known formula (see, e.g. [19])
| (12) |
we may rewrite (3) as
| (13) |
However, the coordinates of the signature vector for a 2-within-consecutive--out-of- system can be determined by the aid of the following expression (see, e.g. [5])
| (14) |
We next combine formulae (3) and (14) and the desired result is straightforward.
Proposition 2 provides closed formulae for determining the probability mass function of the variable defined in (3), within a system consisting of i.i.d. components.
Proposition 2. Let us consider a system under warm standby redundancy. If we denote by the number of its warm components and by the number of surviving warm components at the time point of system’s failure (), then if the lifetimes of both active and warm components are i.i.d. and exponentially distributed with parameters and respectively, then the probability mass function of random variable can be determined as
| (15) |
Proof. The lifetimes of the active components of the underlying system is assumed to follow Exponential distribution with parameter . Therefore, their common survival function can be determined by the aid of (5). In addition, the warm components are assumed to follow an Exponential distribution with parameter . Therefore, their common survival function can be expressed via (6).
As mentioned earlier, the variable takes on value , if exactly warm components out of the available ones have survived till the overall failure of the underlying structure . Based on the fact that the components are assumed to be independent and identically distributed, we once again conclude that for the system can be computed by the aid of (10).
We next combine (2) and (10) and the following holds true
| (16) |
where denotes the coordinate of the signature vector of the system, while the probability density function of the order statistic , e.g. is given by (12). Substituting (12) in (16) we observe that
| (17) |
However, the coordinates of the signature vector for a system can be determined by the aid of the following expression (see, e.g. [20])
We next combine formulae (3) and (3) and the desired result is readily derived.
4 Discussion
In the present work, a signature-based analysis of coherent structures under warm redundancy has been carried out. General speaking, warm redundancy can be particularly useful in systems that require a balance between high availability and cost-effectiveness. Among others, a key reason why warm redundancy proves valuable is that warm redundancy ensures a backup system which can quickly take over in case of a primary system failure, minimizing service interruptions. The theoretical results have been produced under independence. Explicit formulae for determining the probability mass function of the number of alive warm components at the system’s failure are delivered for specific consecutive-type structures. The main contribution of the present work is the investigation of the particular consecutive-type systems under redundancy and the establishment of closed expressions for evaluating their performance. It could be interesting to investigate different reliability structures under warm redundancy and/or having an alternative type of redundancy policy.
References
[1] M. T. Chao, J.C. Fu and M.V. Koutras, “Survey of reliability studies of consecutive--out-of-: F & related systems”, IEEE Transactions on Reliability, vol. 44, no. 1, pp. 120–127, 1995.
[2] D.T. Chiang and S.C. Niu, “Reliability of consecutive--out-of-: system”, IEEE Transactions on Reliability, vol. 30, no. 1, pp. 87–89, 1981.
[3] C. Derman, G.J. Lieberman and S.M. Ross, “On the consecutive--out-of-: system”, IEEE Transactions on Reliability, vol. 31, no. 1, pp. 57–63, 1982.
[4] S. Eryilmaz, “Review of recent advances in reliability of consecutive--out-of-: and related systems”, Proceedings of the Institution of Mechanical Engineering-Part O- Journal of Risk and Reliability, vol. 224, no. 3, pp. 225–237, 2010.
[5] I.S. Triantafyllou and M.V. Koutras, “Signature and IFR preservation of 2-within-consecutive -out-of-: systems”, IEEE Transactions on Reliability, vol. 60, no. 1, pp. 315–322, 2011.
[6] S. Eryilmaz, “Consecutive -within-m-out-of-: System with Nonidentical Components”, Mathematical Problems in Engineering, vol. 2012, 106359, 8 pages, 2012.
[7] I.S. Triantafyllou and M.V. Koutras, “Reliability properties of systems”, IEEE Transactions on Reliability, vol. 63, no. 1, pp. 357–366, 2011.
[8] J.G. Chang, L. Cui, and F.K. Hwang, “Reliabilities for systems”, Statistics & Probability Letters, vol. 43, no. 3, pp. 237–242, 1999.
[9] L. Cui, M. Wang and W. Jiang, “Reliability analysis of A combination of and systems”, Reliability Engineering & System Safety, vol. 249, article ID 110191, 2024.
[10] L. Cui, W. Kuo, J. Li and M. Xie, “On the dual reliability systems of and ”, Statistics & Probability Letters, vol. 76, no. 11, pp. 1081–1088, 2006.
[11] I.S. Triantafyllou, “Reliability study of systems: a generating function approach”, International Journal of Mathematical, Engineering and Management Sciences, vol. 6, no. 1, pp. 44–65, 2021.
[12] P. Mohan, M. Agarwal and K. Sen, “Combined -consecutive--out-of-n:F & consecutive--out-of-n:F systems”, IEEE Transactions on Reliability, vol. 58, no. 2, pp. 328–337, 2009.
[13] F. J. Samaniego, “On closure of the IFR class under formation of coherent systems”, IEEE Transactions on Reliability, vol. 34, no. 1, pp. 69–72, 1985.
[14] J. Navarro, J.M. Ruiz, and C.J. Sandoval, “Properties of coherent systems with dependent components”, Communication in Statistics- Theory and Methods, vol. 36, pp. 175–191, 2007.
[15] S. Eryilmaz, The behavior of warm standby components with respect to a coherent system, Statistics and Probability Letters, vol. 81, pp. 1319–1325, 2011.
[16] M. Sharifi, M. Shahriyari, A. Khajehpoor and S.A. Mirtaheri, “Reliability Optimization of a k-out-of-n Series-Parallel System with Warm Standby Components”, Scientia Iranica, vol. 29, pp. 3523–3541, 2022.
[17] P. Su, G. Wang, and F. Duan, “Reliability Evaluation of a -out-of- (G)-Subsystem Based Multi-State System with Common Bus Performance Sharing”, Reliability Engineering & System Safety, vol. 198, 106884, 2020.
[18] R. Peng, Q. Zhai, and J. Yang, “Reliability Modelling and Optimization of Warm Standby Systems”, Springer, Singapore, 2023.
[19] H.A. David and H.N. Nagaraja, “ Order Statistics”, 3rd Edition, John Wiley & Sons, Hoboken, New Jersey, 2003.
[20] I.S. Triantafyllou, “A Dynamic Reliability Analysis for the Conditional Number of Working Components within a Structure”, Stats, vol. 7, no. 3, pp. 906–923, 2024.
Biography

Ioannis S. Triantafyllou received the bachelor’s degree in Mathematics from National and Kapodistrian University of Athens in 2002, the master’s degree in Applied Statistics from University of Piraeus in 2005, and the philosophy of doctorate degree in Probability & Statistics from University of Piraeus in 2009, respectively. He is currently working as an Assistant Professor at the Department of Statistics & Insurance Science, University of Piraeus. His research interests include Applied Probability, Reliability Theory, Nonparametric Statistics and Statistical Process Control. He has been serving as a reviewer for many highly-respected journals.
Journal of Graphic Era University, Vol. 12_2, 297–308.
doi: 10.13052/jgeu0975-1416.1227
© 2024 River Publishers