Assessment of Alternative Controller Tuning Techniques for Systems without Ultimate Parameters
Ishita Uniyal1,*, Padmanabh Thakur1 and Parvesh Saini2
1Department of Electrical Engineering, Graphic Era University, Dehradun, Uttarakhand, India – 248002
2Department of Project Management, Asia Pacific International College, Melbourne, Victoria, Australia – 3000
E-mail: ishitauniyal777@gmail.com
*Corresponding Author
Received 18 November 2024; Accepted 29 December 2024
Abstract
This work presented in this article aims at designing and analysingalternate methods for tuning of the Proportional – Integral – Derivative (PID) controller for the plants that do not possess the ultimate parameters (ultimate gain and ultimate period). The motivation lies in the fact that the conventional methods such as the Ziegler-Nichols (Z-N) approach require the ultimate parameters for designing the PID controllers. However, because there exist some plants which do not have these parameters, and hence it is difficult to design controllers for such plants using conventional approaches directly. So, there is a need of using some alternative ways to design controllers for such plants. So, in the presented work, Particle Swarm Optimization (PSO), Extended Forced Oscillations (EFO), and Internal Model Control (IMC) methods have been applied for designing PID controllers suitable for such a plant. All the techniques were tested for their capability in optimizing control performance on rise time, settling time, overshoot, and error indices like Integral of Absolute Error (IAE), Integral of Squared Error (ISE), Integral of Time-Weighted Absolute Error (ITAE), and Integral of Time Squared Error (ITSE). Special attention was given to the objective function of ITAE minimization for the PSO-based PID controller. The results show that out of various approaches, the PSO-based PID controller provides the fastest response with minimum overshoot and low values of errors compared to EFO-based and IMC-based PID controllers. The EFO-based PID controller gave a mediocre performance while the IMC-based PID turned out to be the worst, giving a response that was the slowest with maximum errors. This work is carried out for a comprehensive comparison of various alternative tuning approaches, and it presents PSO-based PID as the most robust and reliable solution for plants with no ultimate parameters hence proposes it as an efficient alternative to conventional PID tuning strategies.
Keywords: PID controller, tuning techniques, particle swarm optimization, ultimate parameters, robustness.
1 Introduction
Proportional-Integral-Derivative controllers find extensive applications due to the simplicity, effectiveness, and easiness of implementing the controllers in an industrial automation and control system. In the classical approach, the PID controllers tuning is based on the identification of the ultimate parameters, namely the ultimate gain Ku, period Pu, and frequency, which play a major role in most methods, such as the Ziegler-Nichols tuning rules [1]. The ultimate parameters are inferred from the response of the system to particular kinds of inputs, and then used to calculate the parameters in a PID to obtain a desired performance characteristic. Most systems-in fact, those that have complex, nonlinear, or time-delay dynamics-cannot be tuned by the procedures outlined here because they have no well-defined ultimate parameters [4]. Systems without ultimate parameters are those systems where the dynamics are too complex or too poorly understood to allow identification of these key values. For such systems, traditional methods of PID tuning utterly fail in producing results since they all rely on the pre-existence of ultimate parameters in the system to be tuned. This challenge has created an interest in alternative methods of PID tuning that do not rely on the identification of ultimate parameters. In this regard, heuristic approaches have been developed, including Particle Swarm Optimization (PSO) [4], Extended Forced Oscillation (EFO)technique [12], and Internal Model Control (IMC) [7], which respond to the above challenges [4]. These techniques, in turn, allow a broader perspective toward establishing optimum PID controller parameters for cases where ultimate parameters are undefined or difficult to determine.
This work focuses on the design, analysis, and comparison of different techniques concerning PID tuning in systems without ultimate parameters. The heuristic approaches, together with advanced control strategies, have been considered in this research paper as it tries to give insights into how to effectively design a PID controller for complex systems that do not fit assumptions from conventional tuning methods.
2 Literature Review
The tuning of PID controllers for systems without ultimate parameters has received significant attention, since there is a drawback in using conventional methods such as the Ziegler-Nichols tuning rules. Since its development, the Ziegler-Nichols method [1], based on the determination of the ultimate gain and ultimate period, has been a method of wide application. Its application is limited only to those systems where these ultimate parameters can be easily determined. However, in many cases where the system dynamics are nonlinear, involve large time delays, or are otherwise complex, these parameters are often indeterminable, hence the need for alternative tuning strategies [1].
In these regards, numerous studies have implemented heuristic methods to the tuning of PID controllers where ultimate parameters are unavailable. For example, PSO has been applied with good results in many different applications because of its ability to optimize parameters for a controller without advance knowledge of the ultimate parameters of the system [4]. PSO is a bio-inspired optimization technique simulating social behaviors of organisms, like birds or fish, where the controller parameters are iteratively updated with respect to a population of candidate solution sets so as to optimize the PID controller performance in complex systems.
One of the most popular approaches in PID tuning, where the ultimate parameters are not defined, is that based on Fuzzy Logic [5]. Different from traditional methods, Fuzzy Logic does not depend on an exact mathematical model; instead, it uses a set of linguistic rules to adjust the parameters of the PID. Hence, it works quite effectively in systems with high levels of uncertainty or nonlinearity. Other studies have shown that Fuzzy Logic can provide robust PID tuning solutions even when well-defined ultimate parameters are not available.
The extended forced oscillation method is a more complex technique that generalizes the classical forced oscillation method for systems where ultimate parameters are not easy to determine [6]. It puts oscillations into the system, using the response to tune a PID controller – a different approach from the Ziegler-Nichols method, mainly in systems with a complicated dynamic. Another, more recent approach that has been explored in terms of its robustness and effectiveness in tuning PID controllers for systems without ultimate parameters is the Internal Model Control (IMC) [7]. IMC involves developing a model of the process inside the controller; this model is subsequently used in making a prediction of process behavior and its compensation to reach desired control performance despite the uncertainties and delays. Similarly, Lorenzini et al. (2018) have proposed a modified relay feedback approach that can extend the PID tuning for plants without ultimate frequency, though the applicability to complex systems is limited [23]. Bucz et al. (2015) improve Ziegler-Nichols tuning by including transient performance criteria to ensure robust stability in uncertain systems, but computational intensity creates practical issues [16]. Silva et al. (2024) introduce a constrained PID algorithm based on the GPC principle, with balance between performance and computational intensity but relies on accurate modeling to be applied in unpredictable systems [15]. Cui et al. (2020) propose a relay feedback-tuning method for LADRC: the method achieves better disturbance rejection than traditional PID but presents oscillatory behavior and fails with fast-changing systems [14]. Bucz S. et al. (2014) developed a new way to design PID controllers by improving the Ziegler-Nichols tuning method. Their approach allows the controller’s performance, like overshoot and settling time, to be fine-tuned based on specific needs, something the original method couldn’t do. They tested this on a DC motor and showed it works well in meeting performance goals. However, it might struggle with systems that are very dynamic or nonlinear since it relies on simpler linear models [17]. Lu et al. (2024) proposed a method for TID controller tuning based on a fractional-order Ziegler-Nichols approach, which improves control performance and robustness, especially for complex systems [19]. Li et al. (2023) proposed a new approach to PID and PIDD2 controllers for processes with delays, where the robustness and noise reduction are balanced using a state-space pole placement method [20]. Miguel-Escrig& Romero-Pérez in 2022 introduced a much more efficient, less erroneous system identification through relay feedback, with an avoidance of complicated setup procedures [21]. Hofreiter (2020) provided a shifting relay technique that eases the process of PID controllers tuning through the estimation of some critical parameters from the frequency response points. It is however limited to linear systems [22]. The final addition by Lorenzini et al. in 2019 is to the Ziegler-Nichols tuning method, improving on it with an adjustable-phase relay for more flexible use on different systems. Saini et al. (2022) designed a PI controller for Brushless DC (BLDC) motors using a hybrid optimization method that combines Particle Swarm Optimization (PSO) with fuzzy logic. The work of the study is that this PSO-Fuzzy controller compared with other controllers made from well-known techniques: bacterial forging PSO, ant colony optimization, and simulated annealing. MATLAB simulations were used for testing the controllers, keeping in mind time and frequency responses, performance indices, and sensitivity functions. The results demonstrated that the PSO-Fuzzy-based PI controller outperformed others, offering better control and improved performance for speed regulation of the BLDC motor [24].
These studies thus demonstrate that, whereas traditional PID tuning methods are rather limited in their applicability to systems without ultimate parameters, there is a promising solution from the alternative approaches of PSO, Fuzzy Logic, extended forced oscillation, and IMC. Further development and refinement of techniques are a must for any progress in control system design applicable to complex real-world applications.
3 Problem Statement
In industrial automation and control systems, there are wide applications of PID controllers because of their simplicity and effectiveness. However, the conventional PID tuning methods, such as Zeigler – Nichols [1], rely on the determination of ultimate parameters including ultimate gain (Ku) and ultimate parameter (Pu), which are not well-defined or easily measurable for the systems with complex, nonlinear, or time-delayed dynamics [2, 3]. Consequently, these methods normally cannot give satisfactory solutions in those systems where the dynamics do not conform to the assumptions of classical tuning methods. The above limitation calls for the development and analysis of alternative PID tuning methods which are not based on the ultimate parameters in an attempt to optimize the performance of the controller in the challenging plant [4, 5, 7]. Based on these challenges associated with the traditional controller tuning methods, the following research questions have been developed to explore viable alternatives for PID tuning systematically for complex systems without ultimate parameters. These questions guide the study’s objectives aimed at analyzing and comparing various heuristic and advanced control strategies, which adaptively optimize PID controllers in systems with non-standard dynamics. The RQs and ROs are:
RQ. 1: How does the performance of alternative PID tuning techniques, such as Particle Swarm Optimization (PSO), EFO and IMC, in optimization of controller parameters for systems without ultimate parameters?
RQ. 2: Which one of these alternative tuning methods is provide better stability, response time and robustness for systems without ultimate parameters?
Given the above research questions, the answer to these questions can be obtained through the following research objectives:
RO. 1: To compare the performances of different alternative PID tuning methods, namely PSO, EFO and IMC, for optimum performance in the systems with absent ultimate parameters.
RO. 2: Comparative analysis of PSO, EFO and IMC tuning techniques with respect to the transient response, stability, and robustness for such systems.
For that purpose, a controller design has been developed in order to evaluate these alternative techniques which have been discussed in the following section.
4 Controller Design
This section deals with the controller design for the systems without ultimate parameters. Analternative techniques, namely PSO, have been chosen to improve the PID controller tuning in the systems without well-defined ultimate parameters. These methods give robust, adaptive solutions, appropriate in controlling systems without ultimate parameters found in industrial applications.
In the case of a dynamic system with poorly defined or even non-existent ultimate parameters, the objective is to design a PID controller that will reduce the error between the system output y(t) and the desired set point r(t). The control signal u(t) from a PID controller is given by:
| (1) |
Where, , and are the Proportional, Integral and Derivative gains respectively, and, , is the error signal.
The objective is to maximize these gains to reach the desired control performance. At this stage, the mathematical models must be created to be used by PSO tuning techniques to adjust the gain parameters.
5 Particle Swarm Optimization (PSO) Based Tuning of PID Controller
Particle Swarm Optimization is a population-based, heuristic optimization algorithm. It mimics the social behavior of organisms, like birds and fish. The PSO will optimize the parameters of the PID by simulating a group of particles that represent candidate solutions moving in a search space, where each one represents a possible set of parameters for a PID controller. In PSO, every particle updates its position concerning the best performance it has experienced and the best performance of its neighbors, through formulas that bring convergence over time to some optimal solution [4]. In PSO-based PID tuning, the objective function is formulated based on the evaluation of every candidate solution concerning the system performance indices and transient response such as: rise time, settling time, and overshoot.
The algorithm iteratively adjusts the PID parameters (Kp, Ki, and Kd) until the objective function is minimized, resulting in an optimized set of controller parameters tailored to the particular dynamics of the system. This approach is particularly useful for complex or nonlinear systems, where classical tuning may be aborted, since no exact knowledge of the system model or final parameters is needed. For modeling the PID tuning using PSO in a system without ultimate parameters, the following steps have been considered:
1. Define the objective function that reflects the desired performance of the PID controller. For this research, the following objective function has been defined:
| (2) |
2. Initialize the PSO algorithm parameters such as;
• Swarm Size 50
• Max. number of iterations 300
• Inertia weight () 0.9
• Cognitive coefficient ) 1.5
• Social coefficient () 1.5
• Random number range [] [0, 1]
• Initial positions of particles:
• Initial velocities:
3. Initialize particles and evaluate objective function for each particle to obtain its initial performance.
a. For each particle in the swarm:
i. Initial position within the search space for , and .
ii. Initial velocity within bounds for smooth parameter exploration
4. Update personal best and global best:
a. Personal best: For each particle Xi, store the best value found so far as and corresponding objective function value .
b. Global best: Identify the particle with the best objective function value across the swarm, updating as:
| (3) |
5. Update velocity and position of particles for each particle based on the following equations:
Velocity Update:
Where,
a. is the updated velocity at iteration
b. w is the inertia weight
c. and are acceleration coefficients for the personal and global terms
d. and are random values between 0 and 1
Position Update:
| (5) |
Where,
represents the updated PID parameter set for the next iteration.
6. Evaluate objective function with new positions
After updating Xi, calculate the new objective function value for each particle. If , update . Then update , if the best performance among particles improves.
7. Continue iterating steps 4 to 6 until maximum iterations are reached or the improvement in is below the defined tolerance.
8. Apply the optimized PID parameters once the global best is obtained.
The PSO parameters considered for this research are provided in the table below:
| Parameter | Recommended Value |
| Swarm Size | 50 |
| Maximum Iterations | 300 |
| Inertia Weight | 0.9 |
| Cognitive Coefficient | 1.5 |
| Social Coefficient | 1.5 |
| Random Number Range | [0,1] |
After discussing the PSO algorithm in this section above, now the parameters for PID controller will be determined. The objective is to test the performance and robustness of the PSO based PID tuned controller for a system which does not possess ultimate parameters. For this research work, a transfer function pertaining to the “Aircraft Pitch Angle Dynamics [8] has been considered. The pitch angle dynamics of an aircraft refer to the rotational motion about its lateral (Y) axis, influencing the nose-up or nose-down orientation critical for maintaining altitude and stability during flight. This motion is governed by aerodynamic forces and moments, primarily influenced by control surfaces such as elevators. Pitch control ensures the aircraft maintains its desired altitude or angle of ascent and descent, directly affecting flight stability and manoeuvrability [9]. The pitch angle dynamics of an aircraft, represented by a linearized transfer function, capture the relationship between elevator deflection and pitch response, incorporating parameters like pitch damping, moment of inertia, and aerodynamic stability derivatives. These characteristics are essential in designing controllers for precise, stable pitch adjustments in response to control inputs and disturbances [10].
The dynamics and mathematical modelling of aircraft pitch angle are not in the scope of this research article. Hence, the discussion is limited to the general overview of aircraft pitch angle dynamics. The transfer function considered has been given below:
| (6) |
The transfer function given by (6) has proportional effect of the input on pitch rate in the numerator and denominator includes model inertia, damping and stiffness effects.
The controller gains obtained for the transfer function given in (6) using the equations from (2) to (5) are K; K; and K.
Similarly, the PID controller gains for the given transfer function (6) using EFO method [12] is [K; K; K] and the controller designed for the same transfer function using Internal Model Control (IMC) [7] technique is given by the Equation (7) below:
| (7) |
As the controller obtained through IMC method for the given plant, is a higher order controller. Hence, to obtain the controller gains and ) from the Equation (7), the equation has been approximated using Model Order Reduction technique [7]. Based on this, the PID gains determined for the IMC method are , and . The results for the given plant have been obtained for the using all the three controllers. The results and their analysis have been presented and discussed in the next section.
6 Result Analysis
The results obtained using all three controllers for the given transfer function (6) are discussed in this section. As discussed earlier, this article presents the analysis of the alternative controller tuning techniques for such systems which do not exhibit ultimate gain and frequency. These parameters are also known as ultimate parameters. For this analysis, a relevant transfer function (given by Equation (6)) has been considered. The transfer function belongs to a plant and represents a linearized model of an aircraft pitch angle dynamics [12]. For the selected plant, three different techniques viz. PSO, EFO and IMC, have been selected to design and tune PID Controller. To implement each controller tuning technique as specified above, MATLAB has been used to simulate the responses. First, the open loop step response of the given plant has been simulated and is depicted by Figure 1. The open-loop step response (Figure 1) of the plant shows a gradual increase in the output variable, with a slight initial delay and oscillation before the output begins to rise linearly. This linear rise suggests that the plant may have a type of integrating behavior. The system’s response lacks stability and would require control to ensure proper tracking and stability.
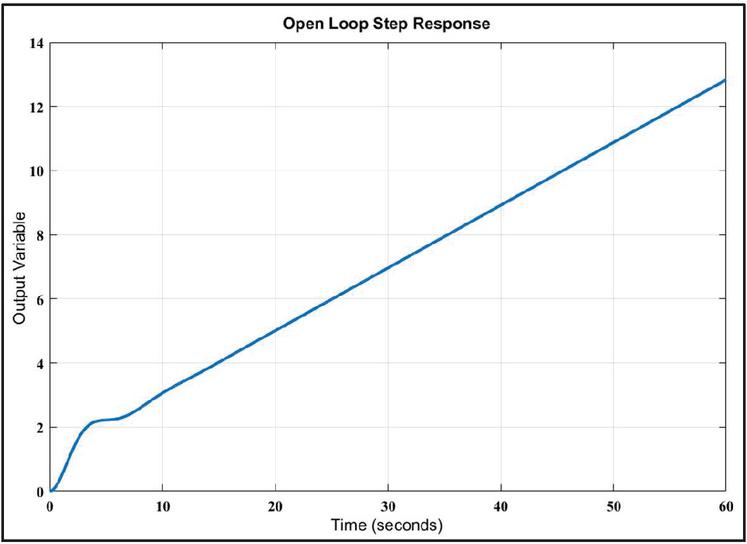
Figure 1 Open loop step response.
Figure 2 depicts the root locus plot that reveals the poles of the open-loop system, showing two poles with trajectories moving away from the real axis and one pole moving towards the origin. The location of these poles suggests that the system could be marginally stable, as poles near the imaginary axis indicate oscillatory behaviour. Effective control is required to place the poles in a stable region, particularly through a PID controller that can help achieve desired damping and stability.
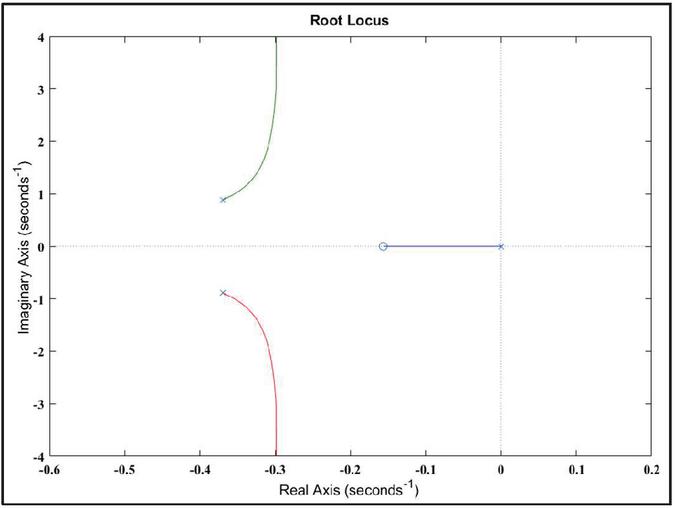
Figure 2 Root locus of the plant.
Figure 3 represents the Bode plot shows the frequency response of the plant. The magnitude plot decreases with frequency, and there is a significant phase lag at higher frequencies, indicating a sluggish response. The phase margin is around 46.9, suggesting some level of stability, but it may still be prone to oscillations. A controller can help to improve the phase margin, thereby enhancing stability and reducing response time.
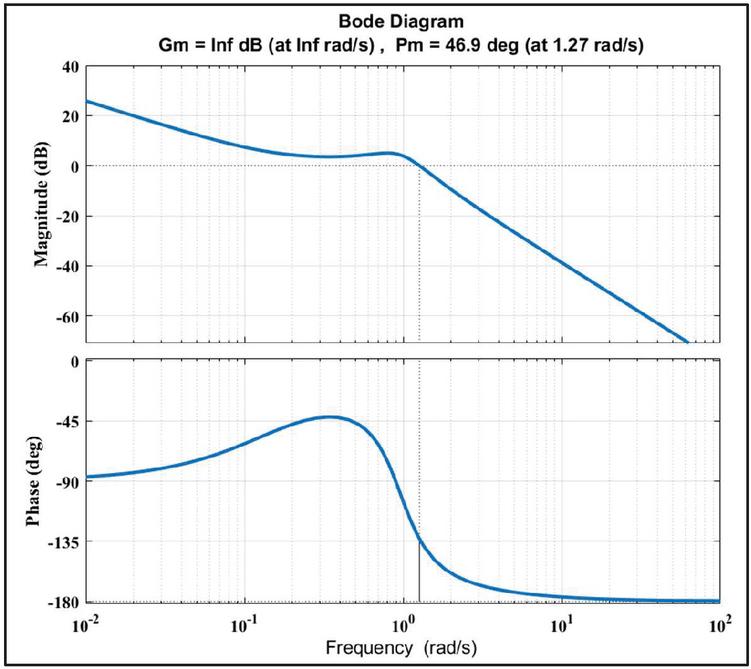
Figure 3 Bode plot of the plant.
Figure 4, the closed-loop step response comparison shows that the PSO-based PID controller provides the best performance, achieving the fastest rise time, minimal overshoot, and quick steady-state response, making it highly suitable for applications requiring precise and rapid control. The EFO-based PID controller, while not as fast as PSO, offers a balanced performance with a moderate rise time and overshoot, making it suitable for applications where a slightly slower response is acceptable. In contrast, the IMC-based PID controller has the slowest response and the highest overshoot, resulting in a slower settling time, which makes it the least favourable option among the three for applications that demand quick and stable control.
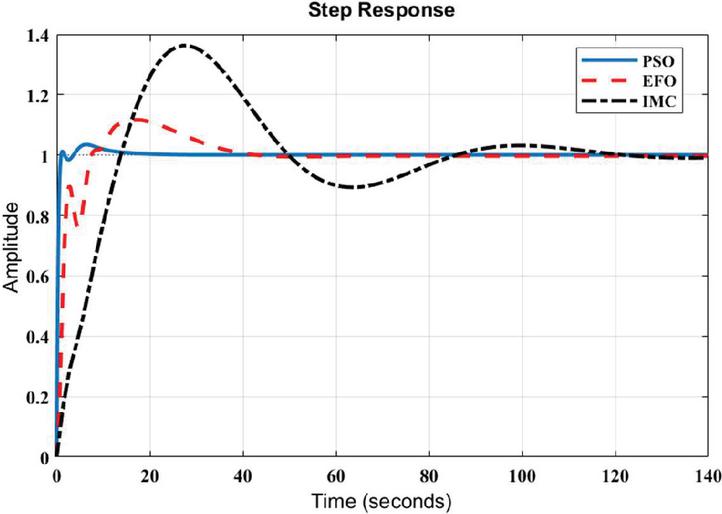
Figure 4 Closed loop step response comparison.
The respective values of closed loop step response of the given plant using three different controllers have been presented in Table 2. The different PID methods have different control characteristics shown in the closed-loop response metrics. Among the PSO-based PID controllers, the best performance is that of the shortest rise time of 1.26 seconds, the fastest settling time at 14.61 seconds, and the lowest overshoot at 7.49%, which means a very responsive and stable system. EFO-based PID regulator is slower, with a rise time of 5.89 seconds and a settling time of 35.58 seconds but shows a moderate overshoot of 11.68%, hence reasonably effective, even though it is not as good as the PSO-based PID. The IMC-based PID controller gives the slowest response with a rise time of 11.21 seconds, an extended settling time of 110.29 seconds, and the highest overshoot at 36.28%, which indicates low responsiveness and stability in comparison with other controllers.
Table 2 Closed loop response metrics for different controllers
| Performance Indices | PSO | EFO | IMC |
| IAE | 0.4505 | 2.0324 | 5.7759 |
| ISE | 0.1473 | 1.0037 | 3.7675 |
| ITAE | 0.9692 | 1.4610 | 11.2875 |
| ITSE | 0.0185 | 0.0427 | 2.5482 |
The performance indices IAE, ISE, ITAE, and ITSE (Table 3) reflect the control quality of each PID approach, with lower values indicating better performance. The PSO-based PID controller has the lowest values across all indices, suggesting superior control quality with minimal error and effective disturbance rejection, making it the most precise and stable option. The EFO-based PID controller shows moderate performance, with error values higher than PSO but still lower than IMC, reflecting an acceptable but less refined level of control. The IMC-based PID controller has the highest values for all indices, indicating the largest error and least effective disturbance handling, which aligns with its slower response and greater deviation from the desired setpoint.
Table 3 Performance indices for different controllers
| Performance Indices | PSO | EFO | IMC |
| Rise Time (s) | 1.26 | 5.8988 | 11.21 |
| Settling Time (s) | 14.61 | 35.5804 | 110.29 |
| Overshoot (%) | 7.49 | 11.6839 | 36.28 |
Figure 5 depicts the graph that compares the ITAE (Integral of Time-weighted Absolute Error) performance of three controllers – PSO-based PID (blue), EFO-based PID (red), and IMC-based PID (black) – over time. Since the objective of the research presented in this article is to minimize the ITAE, the PSO-based PID controller has been designed specifically to achieve the lowest possible ITAE value. From the Figure 5, it’s evident that the PSO-based PID controller achieves a significantly lower ITAE value right from the beginning, reaching close to zero around 1.5 seconds and maintaining minimal error throughout the time period. This proves that the PSO-based PID controller reduces the error effectively and rapidly, finally achieving the goal of the research. The EFO-based PID controller works fairly well; starting from a higher ITAE value than PSO, it decreases it over time, and after a certain period of time, it stabilizes around a lower value, not as low as PSO. On the other hand, the IMC-based PID controller shows the highest value of ITAE during the whole period of time. It decreases slowly as compared to the other two controllers, which means less effective error minimization and less efficient counteracting of disturbances. In general, the PSO-based PID controller is most effective at minimizing ITAE and, hence, highly suitable for the research objective here. The EFO-based PID gives moderate performance, while the IMC-based PID is the least effective among the controllers in terms of minimizing the ITAE. This analysis hereby duly confirms the desired goal of the research to provide superior control quality via a minimal error over time.
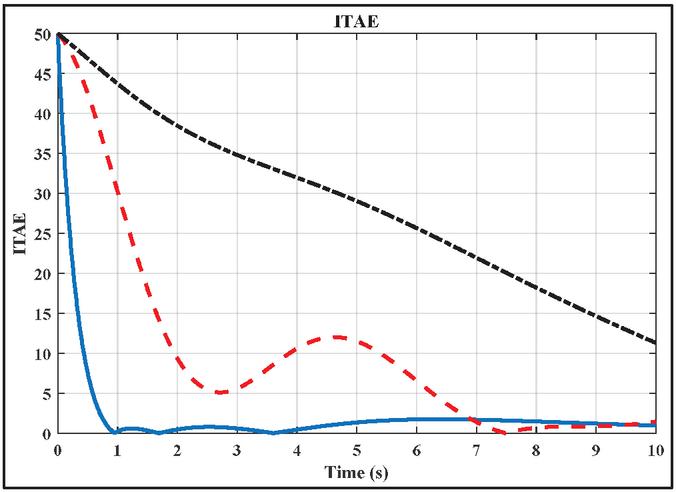
Figure 5 Comparison of ITAE of the plant for different controllers (Blue line: Proposed; Red Dashed line: EFO and Black Dashed – Dot line: IMC).
From the results provided and presented above, the PSO-based PID controller consistently outperforms the EFO and IMC-based PID controllers across all performance metrics, achieving the fastest response time, lowest overshoot, and minimal error values (IAE, ISE, ITAE, ITSE). It shows the most effective error minimization and control quality, particularly excelling in ITAE reduction as seen in the objective-driven analysis. The EFO-based PID controller offers moderate performance with higher error and slower response than PSO, but it still performs better than IMC. The IMC-based PID controller, with the slowest response and highest error values, is the least effective, indicating it is less suitable for applications requiring precise and rapid control. From the overall analysis, it has been observed that the PID controller designed using PSO algorithm provides better control which makes it an optimal choice among all the three controller tuning techniques.
7 Conclusion & Future Scope
In conclusion, this research presented successfully demonstrates that alternative PID tuning techniques – specifically PSO, EFO, and IMC – can provide effective control for plants with unknown ultimate parameters, where the application of conventional methods like Ziegler-Nichols is not possible. Among the methods implemented, PID controller based on PSO showed the best overall performance in terms of the fastest rise and settling times, smallest overshoot, and smallest values of errors in all indices and best in terms of ITAE minimization, which is the prime objective of the present study. The EFO-based PID controller provided satisfactory performance, though less efficient than the PSO-based PID. The IMC-based PID controller was stable but presented the slowest response and highest error values among the three, thus being the least performing. The results prove that, among these three different PID controllers, the one based on PSO is the most appropriate method for plants without ultimate parameters, and it presents a robust and efficient alternative to the conventional methods of PID tuning.
The future scope of the proposed study focuses on advancing and refining alternative PID tuning techniques for systems without ultimate parameters. The study opens doors for applying the alternative techniques for tuning PID controllers in plants where the controller cannot be tuned using conventional methods. It would be promising to explore into the latest optimization techniques such as the evolutionary algorithms or machine learning which can make the controllers even more efficient, effective and adaptable.
References
[1] J. G. Ziegler and N. B. Nichols, “Optimum settings for automatic controllers,” Trans. ASME, vol. 64, no. 11, pp. 759–768, (1942).
[2] W. Tan, “Tuning of PID controllers based on gain and phase margin specifications,” Automatica, vol. 44, no. 11, pp. 3011–3018, doi: 10.1016/j.automatica.2008.05.022 (2008).
[3] S. Skogestad, “Simple analytic rules for model reduction and PID controller tuning,” Journal of Process Control, vol. 13, no. 4, pp. 291–309, doi: 10.1016/S0959-1524(02)00062-8 (2003).
[4] J. Kennedy and R. Eberhart, “Particle swarm optimization,” Proceedings of ICNN’95 – International Conference on Neural Networks, Perth, WA, Australia, pp. 1942–1948, doi: 10.1109/ICNN.1995.488968 (1995).
[5] L. A. Zadeh, “Fuzzy logic,” Computer, vol. 21, no. 4, pp. 83–93, doi: 10.1109/2.53 (1988)
[6] W. Tan, “Tuning of PID controllers based on gain and phase margin specifications,” Automatica, vol. 44, no. 11, pp. 3011–301, doi: 10.1016/j.automatica.2008.05.022 (2008).
[7] M. Morari and E. Zafiriou, Robust Process Control. Englewood Cliffs, NJ, USA: Prentice-Hall, (1989).
[8] University of Michigan, “Aircraft Pitch: System Modeling in Control Tutorials for MATLAB & Simulink,” [Online]. Available: http://ctms.engin.umich.edu.
[9] J. D. Anderson, Introduction to Flight, 8th ed. New York, NY, USA: McGraw-Hill Education, (2017).
[10] R. C. Nelson, Flight Stability and Automatic Control, 2nd ed. New York, NY, USA: McGraw-Hill, (1998).
[11] B. L. Stevens and F. L. Lewis, Aircraft Control and Simulation, 2nd ed. Hoboken, NJ, USA: Wiley, (2003).
[12] A S. Bazanella, L. F. A. Pereira, and A. Parraga, “A new method for PID tuning including plants without ultimate frequency,” IEEE Transactions on Control Systems Technology, vol. 25, no. 2, pp. 637-644, doi: 10.1109/TCST.2016.2557723 (2017).
[13] D. E. Seborg, T. F. Edgar, and D. A. Mellichamp, Process Dynamics and Control, 3rd ed. Hoboken, NJ, USA: Wiley, (2010).
[14] W. Cui, W. Tan, D. Li, Y. Wang and S. Wang, “A Relay Feedback Method for the Tuning of Linear Active Disturbance Rejection Controllers,” in IEEE Access, vol. 8, pp. 4542–4550, doi: 10.1109/ACCESS.2019.2963419 (2020).
[15] L. R. da Silva, R. C. C. Flesch, and J. E. Normey-Rico, “PID algorithm based on GPC for second-order models with input and output constraints,” IFAC-PapersOnLine, vol. 58, no. 7, pp. 7–12, doi: 10.1016/j.ifacol.2024.08.002 (2024).
[16] Š. Bucz, A. Kozáková, and V. Veselý, “Robust PID controller design for performance based on ultimate plant parameters,” IFAC-PapersOnLine, vol. 48, no. 14, pp. 388–395, doi: 10.1016/j.ifacol.2015.09.488 (2015).
[17] S. Bucz, V. Veselý, A. Kozáková, and S. Kozák, “A novel PID controller design methodology for specified performance using ultimate plant parameters,” IFAC Proceedings Volumes, vol. 47, no. 3, pp. 4909–4914, doi: 10.3182/20140824-6-ZA-1003.02472 (2014).
[18] T.-Y. Guo, L.-S. Lu, S.-Y. Lin, and C. Hwang, “Design of maximum-stability PID controllers for LTI systems based on a stabilizing-set construction method,” Journal of the Taiwan Institute of Chemical Engineers, vol. 135, Art. no. 104366, doi: 10.1016/j.jtice.2022.104366 (2022).
[19] C. Lu, R. Tang, C. Li, J. Nwoke, J. Viola, and Y. Chen, “A fast relay feedback auto-tuning tilt-integral-derivative (TID) controller method with the fractional-order Ziegler–Nichols approach,” ISA Transactions, vol. 150, pp. 322–337, doi: 10.1016/j.isatra.2024.05.009 (2024).
[20] Y. Li, J. Bi, W. Han, and W. Tan, “Tuning of PID/PIDD2 controllers for integrating processes with robustness specification,” ISA Transactions, vol. 140, pp. 224–236, doi: 10.1016/j.isatra.2023.05.015 (2023).
[21] O Miguel-Escrig and J.-A. Romero-Pérez, “Improving the identification from relay feedback experiments,” Automatica, vol. 135, Art. no. 109987, doi: 10.1016/j.automatica.2021.109987 (2022).
[22] M. Hofreiter, “Relay Feedback Identification with Shifting Filter for PID Control,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 10701–10706, doi: 10.1016/j.ifacol.2020.12.2847 (2020).
[23] C. Lorenzini, A. S. Bazanella, L. F. A. Pereira, and G. R. G. da Silva, “The generalized forced oscillation method for tuning PID controllers,” ISA Transactions, vol. 87, pp. 68–87, doi: 10.1016/j.isatra.2018.11.014 (2019).
[24] P. Saini, P. Thakur, R. C. Bansal, A. Dixit, V. Shrivastava and J. Kumar, “Design of Controller for Brushless DC Motor Using a Hybrid Optimization Technique,” 2022 IEEE 10th Power India International Conference (PIICON), New Delhi, India, pp. 1–6, doi: 10.1109/PIICON56320.2022.10045261 (2022).
Biographies

Ishita Uniyal is currently associated as an Assistant Professor with the Department of Electrical Engineering, Graphic Era Hill University, Dehradun (Uttarakhand, India), and as a Research Scholar, Graphic Era Deemed to be University, Dehradun. She has completed Bachelors of Technology in Electrical Engineering from GBPEC, Pauri, in the year 2014 and Masters of Engineering in Control System from Graphic Era Deemed to be University in the year 2017. Presently pursuing Ph.D. from Graphic Era Deemed to be University, Dehradun (Uttarakhand India).

Padmanabh Thakur received the B. Tech. degree in Electrical Engineering from Muzaffarpur Institute of Technology, Muzaffarpur, India, in 1997; M. Tech. degree in Electrical Engineering from Udaipur, Rajasthan, India, in 2008; and Ph.D. degree in Electrical Engineering from Motilal Nehru National Institute of Technology, Allahabad, India, in 2014. Presently, he is a Professor in the Department of Electrical Engineering, Graphic Era (Deemed to be University), Dehradun, Uttarakhand, India, and holds the responsibility of Associate Editor, IEEE ACCESS. Also, he had been associated with IEEE UP Section as a Convener (IEEE SIGHT) and Executive Committee Member (IEEE UP Section).

Parvesh Saini is currently associated as a lecturer with Asia Pacific International College, Melbourne, Australia. He has completed Bachelors of Technology in Instrumentation and Control from Kurukshetra University, Kurukshetra (Haryana, India), in the year 2004; Masters of Engineering in Instrumentation and Control from Panjab University Chandigarh (India) in year 2008; and Ph.D. from Graphic Era Deemed to be University, Dehradun (Uttarakhand India) in 2020.
Journal of Graphic Era University, Vol. 13_1, 119–138.
doi: 10.13052/jgeu0975-1416.1316
© 2025 River Publishers